|
I am a senior research scientist at Google, in the Semantic Perception team of Federico Tombari. I received my PhD in 2024, from ETH Zurich in the Computer Vision Lab, supervised by Prof. Luc Van Gool and Dr. Martin Danelljan. My PhD was focused on Computer Vision and its applications, especially in the tasks of image matching, 3D reconstruction, pose estimation and novel-view rendering. During my PhD I had the opportunity to intern both in Google working with Federico Tombari, and in Microsoft Mixed Reality & AI Labs, hosted by Marc Pollefeys. I am also one of the recipient of the Apple AI/ML PhD Fellowship of 2022. Prior to that, I obtained a Master’s degree in Mechanical Engineering with honors at ETH Zurich. I also conducted an internship at RetinAI focused on computer vision applied to medical images. |

|
|
|
|
|
|
---- show more ---- |
|
|
|
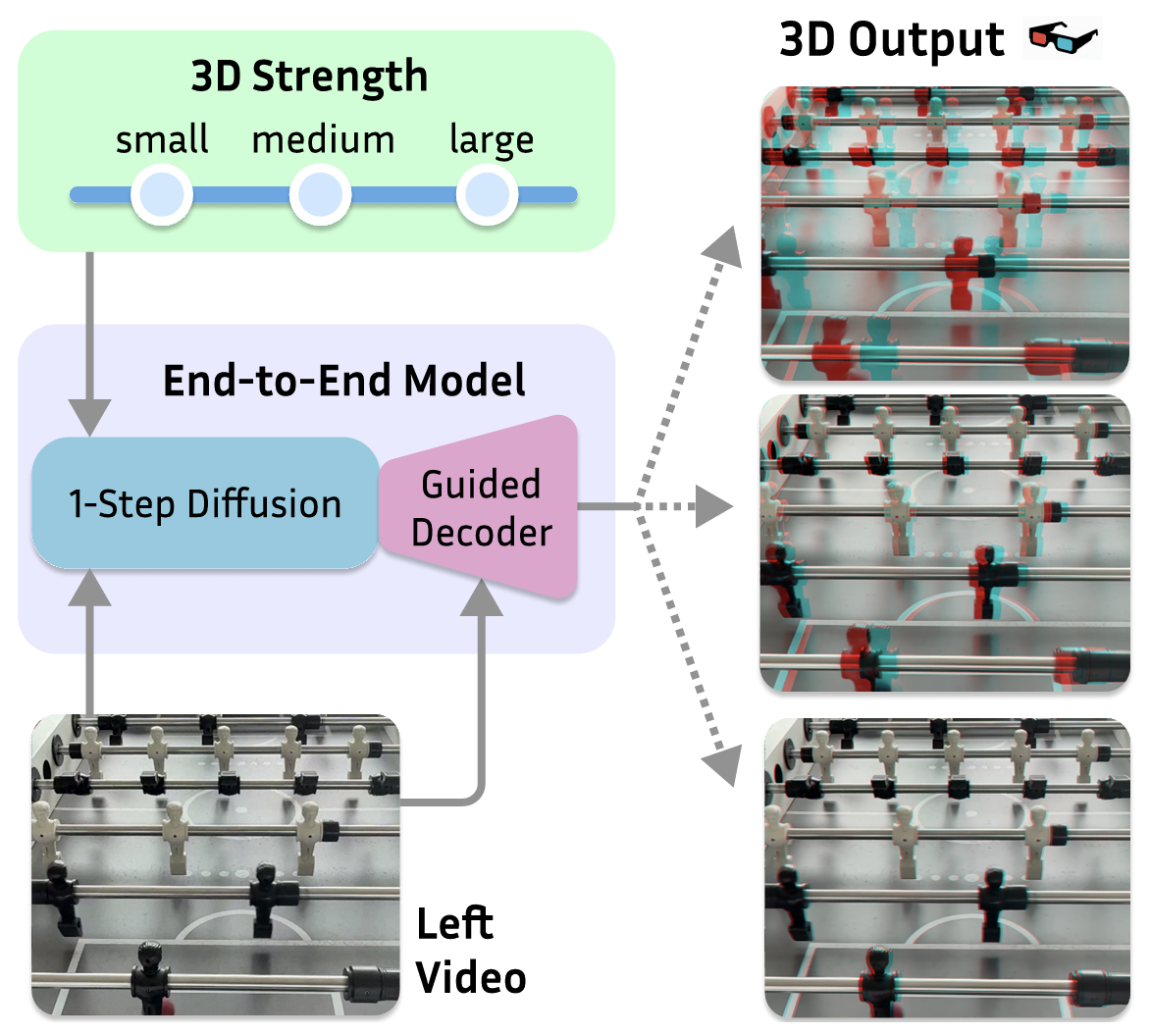
Nando Metzger, Prune Truong, Goutam Bhat, Konrad Schindler, Federico Tombari Arxiv 2025 citation | website | paper We turn 2D videos into 3D stereo videos using a controllable end-to-end model with a novel guided Decoder. No warping, high sharpness, minimal binocular rivalry, and adjustable 3D strength. |
|
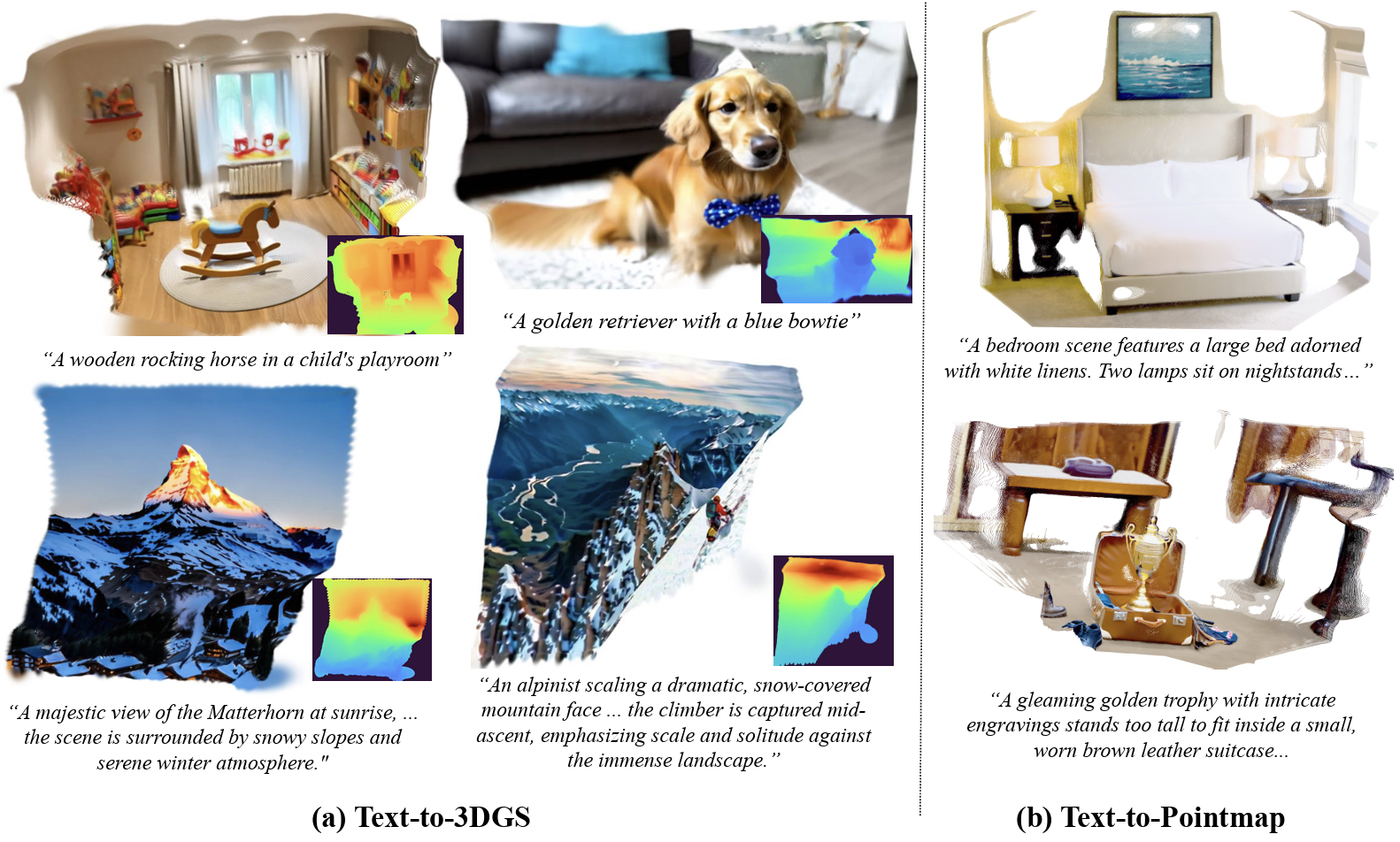
Hyojun Go, Dominik Narnhofer, Goutam Bhat, Prune Truong, Federico Tombari, Konrad Schindler Arxiv 2025 citation | website | paper | code Meet VIST3A — Text-to-3D by Stitching a Multi-view Reconstruction Network to a Video Generator, a new framework that connects the best of two worlds: 🎥 Video diffusion models for rich latent visual generation, and 🌍 Feed-forward 3D models (like VGGT, AnySplat, or MVDUSt3R) for geometric reconstruction. |
|
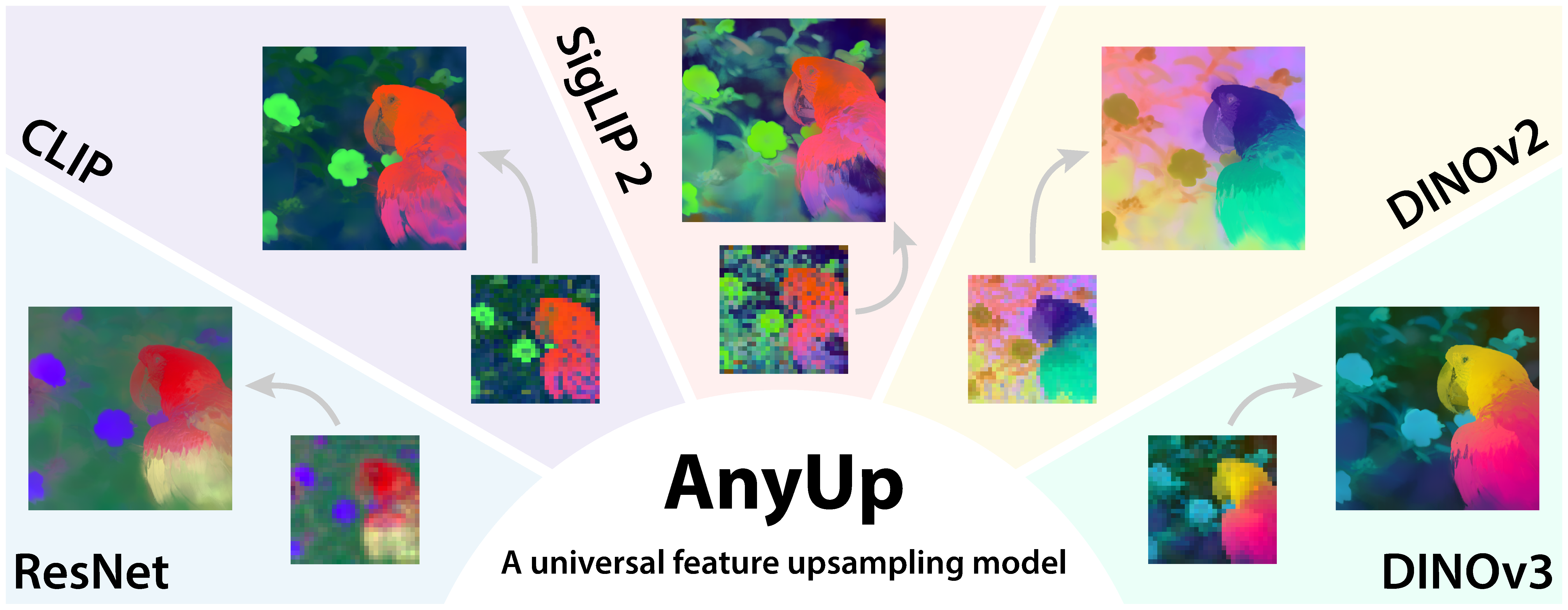
Thomas Wimmer, Prune Truong, Marie-Julie Rakotosaona, Michael Oechsle, Federico Tombari, Bernt Schiele, Jan Eric Lenssen Arxiv 2025 citation | website | paper | code We introduce AnyUp, a method for feature upsampling that can be applied to any vision feature at any resolution, without encoder-specific training. |
|
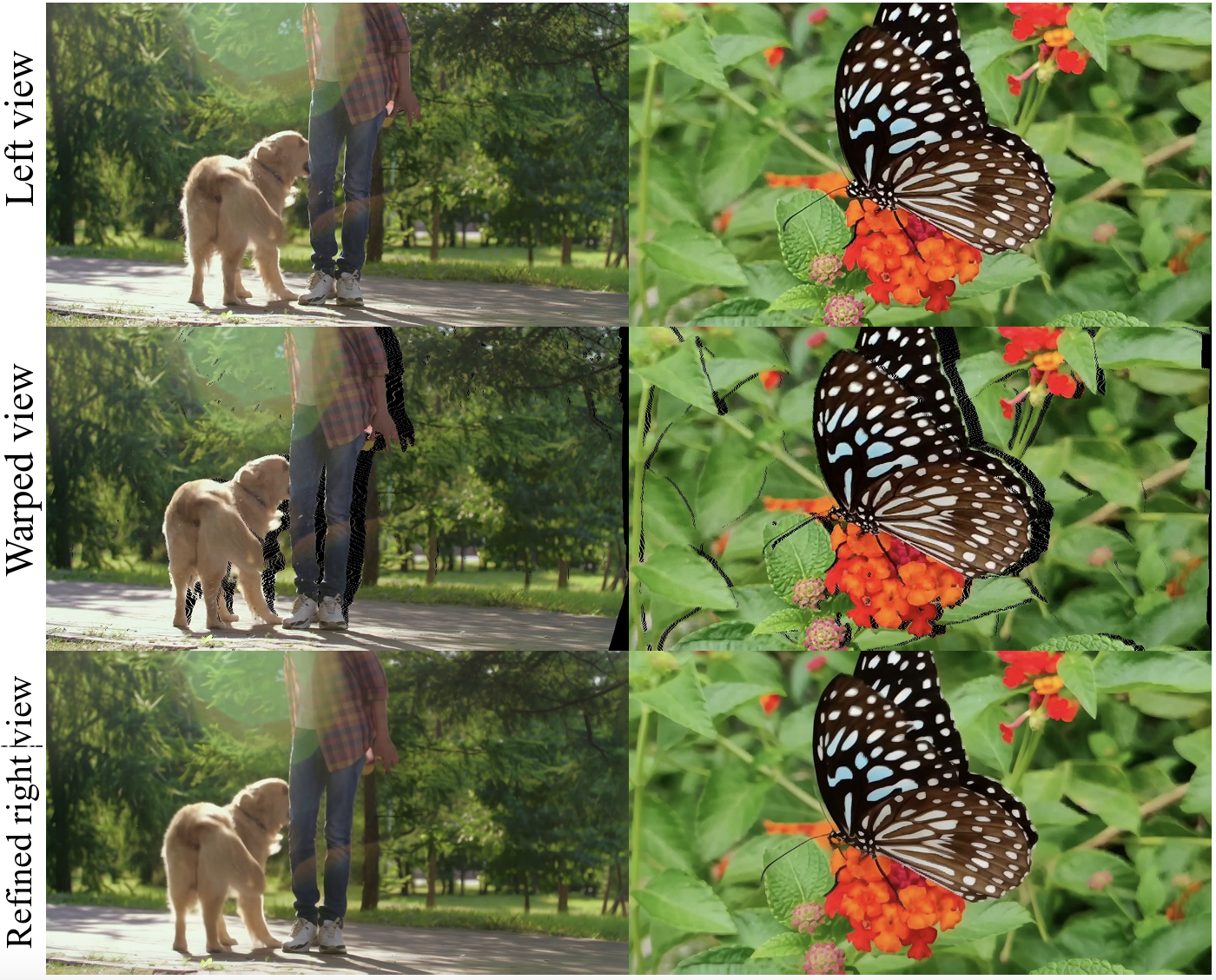
Nina Shvetsova, Goutam Bhat, Prune Truong, Hilde Kuehne, Federico Tombari 3DV 2026 citation | website | paper We tackle the problem of monocular-to-stereo video conversion and propose a novel architecture for inpainting and refinement of the warped right view obtained by depth-based reprojection of the input left view. |

|
Mengya Liu, Siyuan Li, Ajad Chhatkuli, Prune Truong, Luc Van Gool, Federico Tombari CVPR 2025 citation | paper | code We propose a novel method, One2Any, that estimates the relative 6-degrees of freedom (DOF) object pose using only a single reference-single query RGB-D image, without prior knowledge of its 3D model, multi-view data, or category constraints. |
|
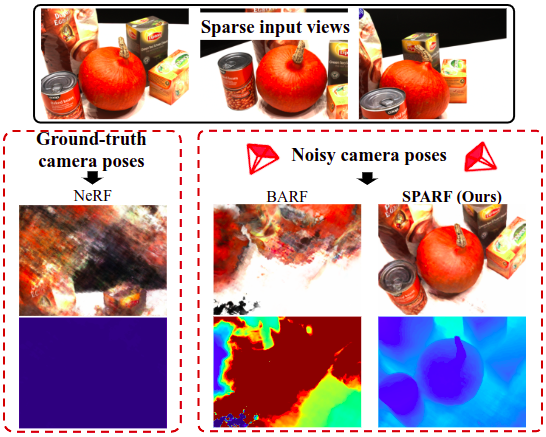
Prune Truong, Marie-Julie Rakotosaona, Fabian Manhardt, Federico Tombari CVPR 2023 - Highlight (top 2.5%) citation | paper | project page | video (8 min) | teaser video | poster | code We propose SPARF, a joint pose-NeRF refinement approach, applicable to extreme scenarios with only 2/3 input views and noisy camera poses. SPARF is the only method producing realistic novel-view synthesis from as few as 2 input images with noisy poses. |
|
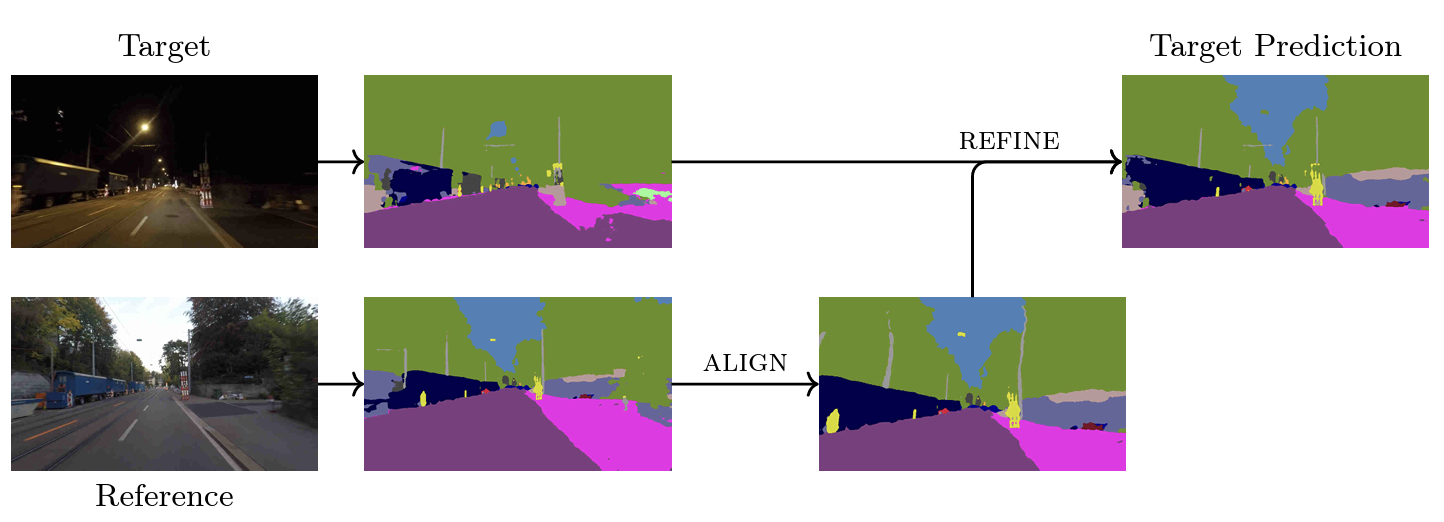
David Bruggemann, Christos Sakaridis, Prune Truong, Luc Van Gool WACV 2023 citation | paper | code We propose Refign, a generic extension to self-training-based domain adaptation methods for semantic segmentation. |
|
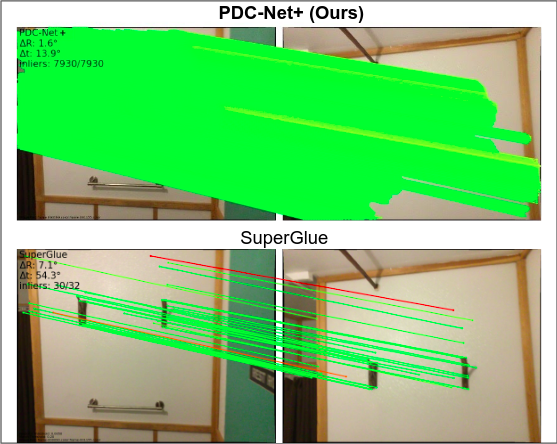
Prune Truong, Martin Danelljan, Radu Timofte, Luc Van Gool TPAMI 2023 citation | paper | project page | code We propose an approach for estimating dense correspondences between two views along with a confidence map. We extend PDC-Net with new applications to image-based localization, 3D reconstructions and texture-transfer. |
|
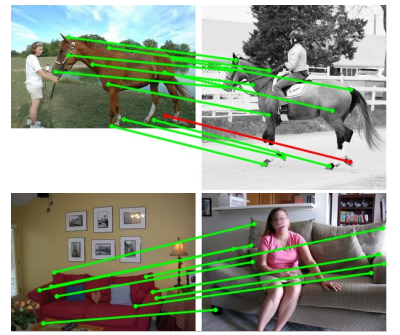
Prune Truong, Martin Danelljan, Fisher Yu, Luc Van Gool CVPR 2022 citation | paper | teaser video | poster | code We propose a weakly-supervised training strategy for learning semantic correspondences. We introduce a weakly-supervised training objective applied to probabilistic mapping as well as an approach to model and identify occluded and unmatchable regions. |
|
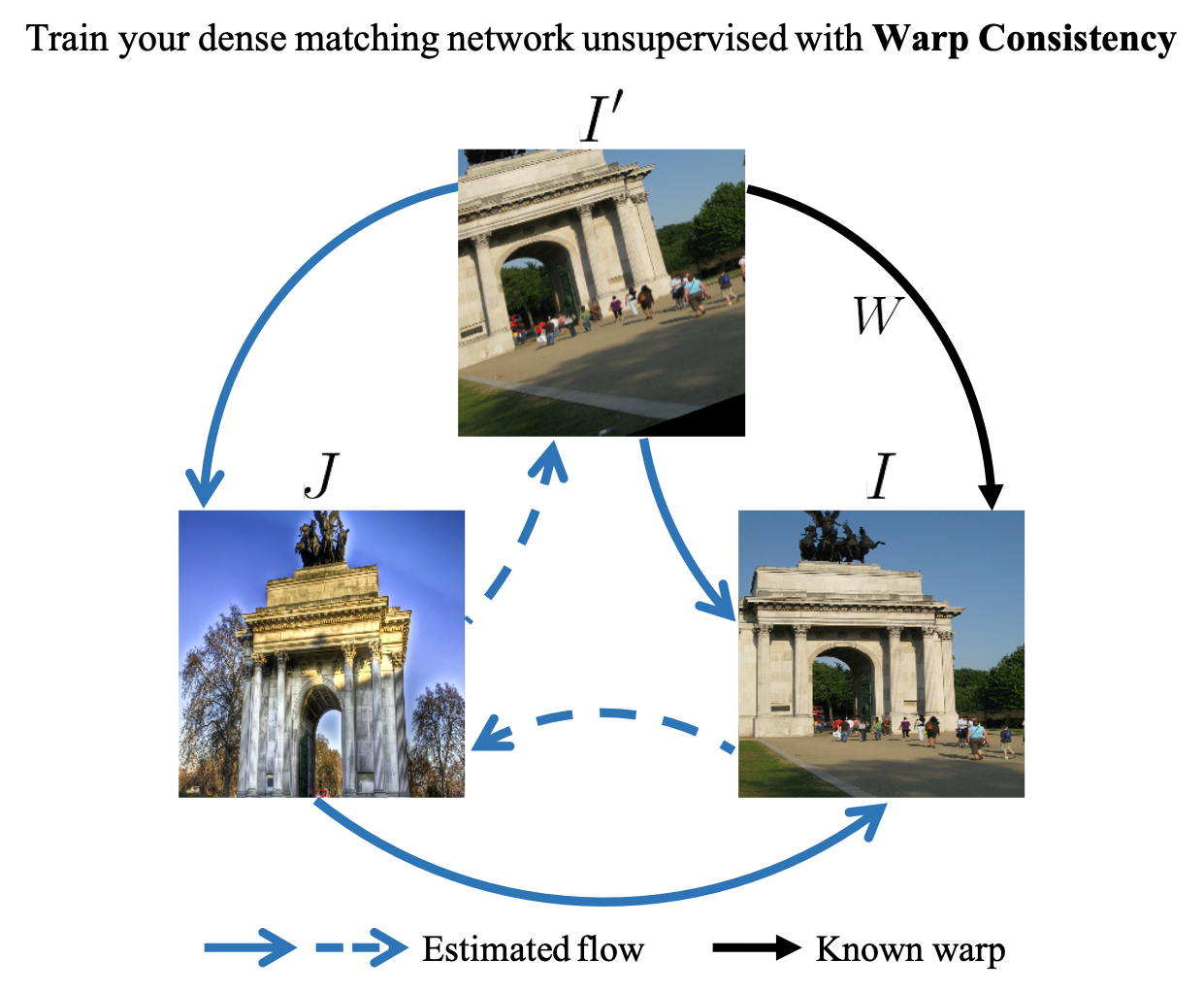
Prune Truong, Martin Danelljan, Fisher Yu, Luc Van Gool ICCV 2021 - Oral (top 3.0%) citation | paper | teaser video | poster | code We propose an unsupervised training objective for learning to regress the dense correspondences relating a pair of images. Our loss leverages real image pairs without invoking the photometric consistency assumption. Unlike previous approaches, it is capable of handling large appearance and view-point changes. |
|
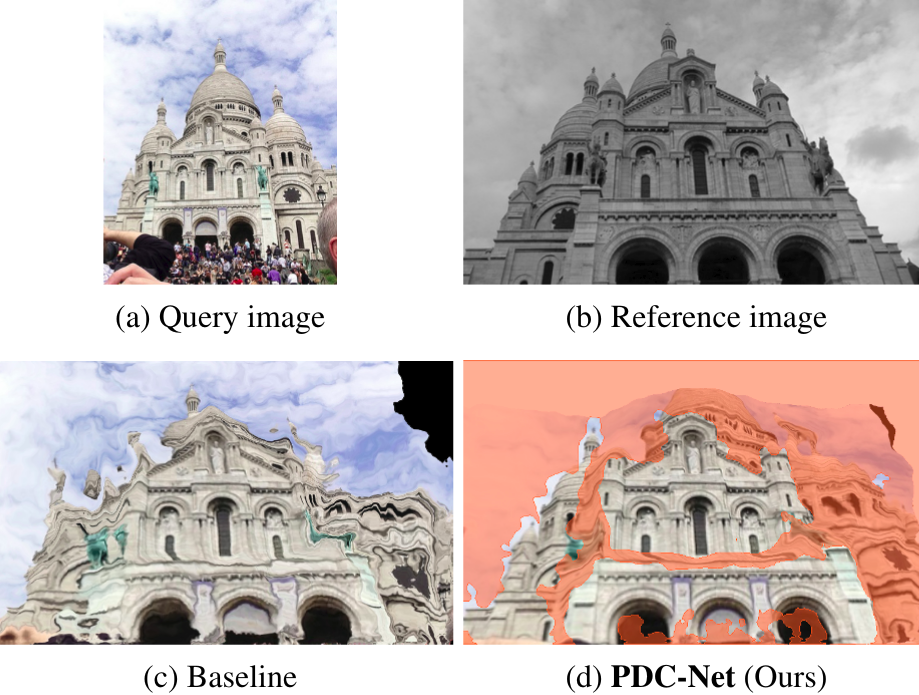
Prune Truong, Martin Danelljan, Luc Van Gool, Radu Timofte CVPR 2021 - Oral (top 4.0%) citation | paper | project page | teaser video | poster | slides | code We develop a flexible probabilistic approach that jointly learns the dense correspondence prediction and its uncertainty. We parametrize the predictive distribution as a constrained mixture model and develop an architecture and training strategy tailored for robust and generalizable uncertainty prediction in the context of self-supervised training. |
|
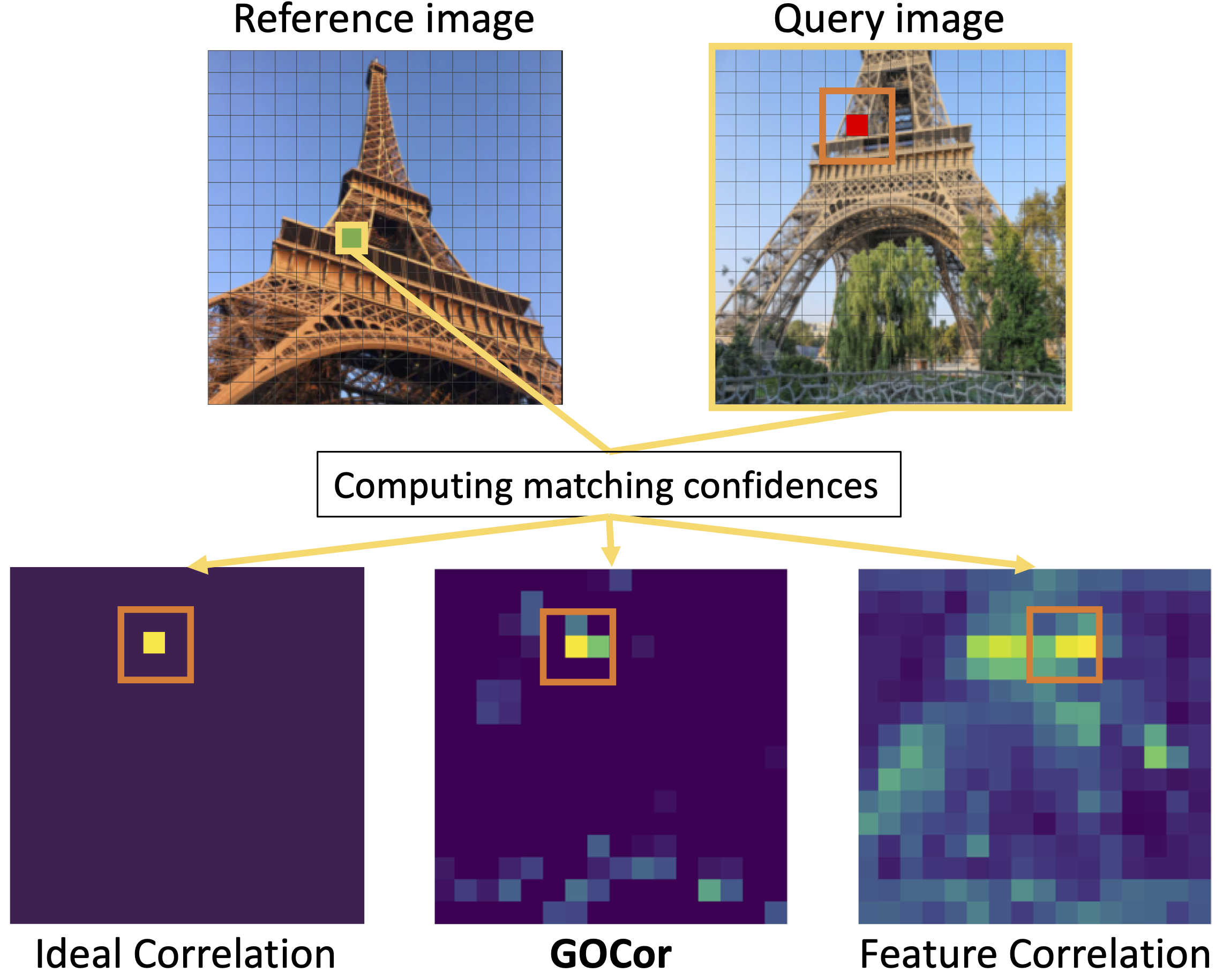
Prune Truong, Martin Danelljan, Luc Van Gool, Radu Timofte NeurIPS 2020 citation | paper | teaser video | CV Talks video | code We propose GOCOr, a fully differentiable dense matching module, acting as a direct replacement to the feature correlation layer. The correspondence volume generated by our module is the result of an internal optimization procedure that explicitly accounts for - and suppressed - similar regions in the scene. |
|
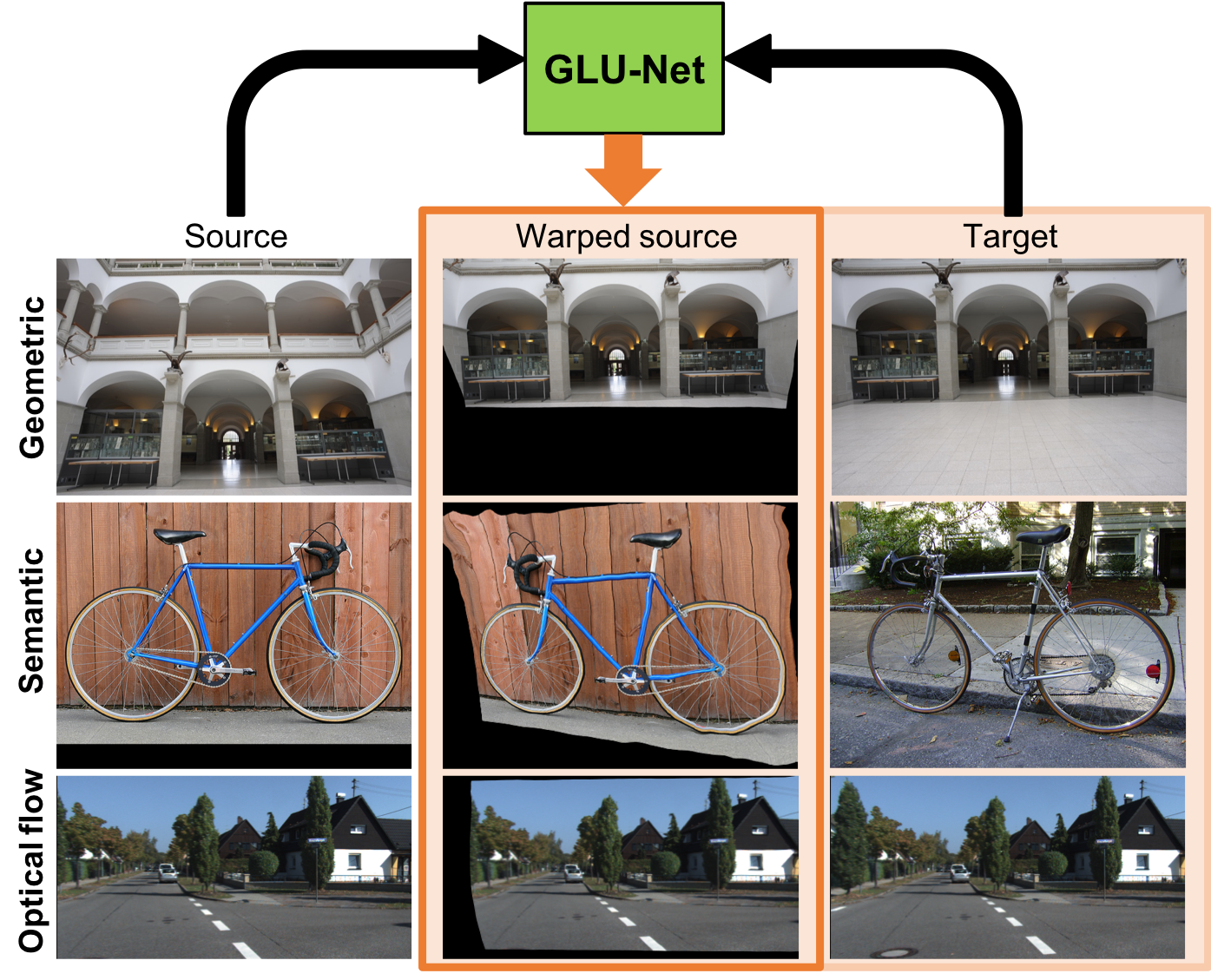
Prune Truong, Martin Danelljan, Luc Van Gool, Radu Timofte CVPR 2020 - Oral (top 5.7%) citation | paper | teaser video | slides | poster | oral video | code We propose GLU-Net, a unified architecture to estimate dense correspondences between any image pair, i.e. different views of the same scene, consecutive frames of a video or even different instances of the same object category. |
|
Prune Truong, Stefanos Apostolopoulos, Agata Mosinska, Samuel Stucky, Carlos Ciller, Sandro De Zanet ICCV 2019 citation | paper | poster | code We propose a training strategy for keypoint detection, applicable to low-quality and textureless images, frequent in the medical domain. We learn keypoint detection by training directly for the final matching accuracy instead of indirect metrics such as repeatability. |
|
template adapted from this awesome website |